Gato: Gait and Trajectory Optimization for legged systems through Phase-based Endeffector Parameterization
Alexander Winkler
Dario Bellicoso
Marco Hutter
Jonas Buchli
IEEE Robotics and Automation Letters (RA-L) 2018
[PDF] [Code] [Link]
Abstract
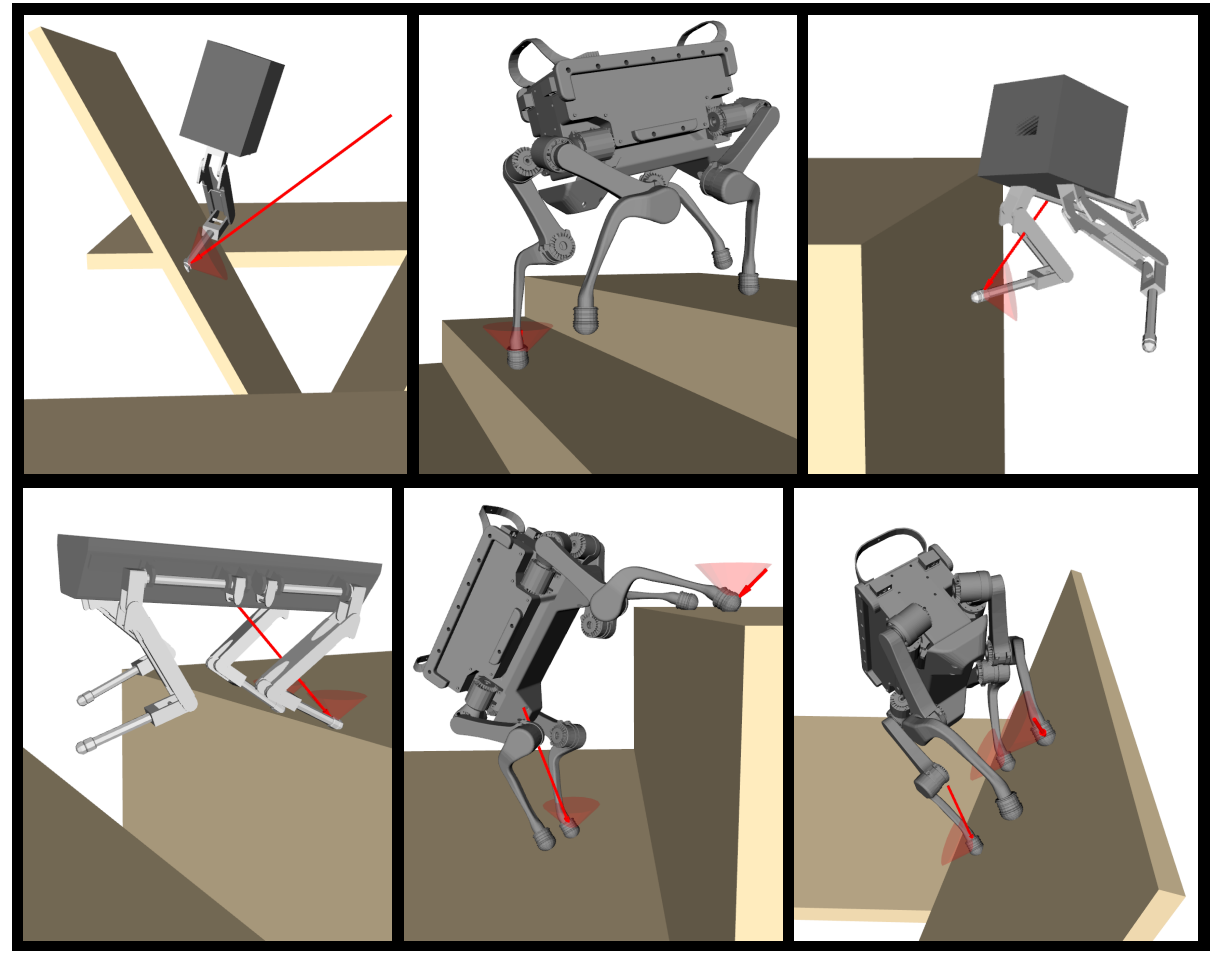
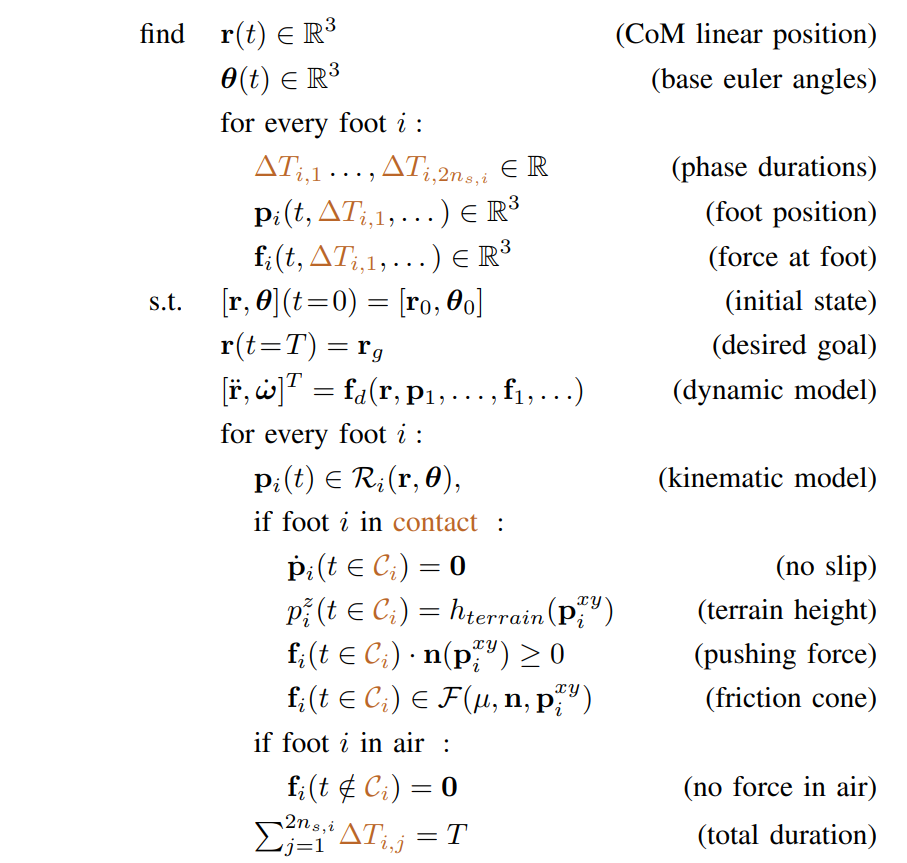
We present a single Trajectory Optimization formulation for legged locomotion that automatically determines the gait-sequence, step-timings, footholds, swing-leg motions and 6D body motion over non-flat terrain, without any additional modules. Our phase-based parameterization of feet motion and forces allows to optimize over the discrete gait sequence using only continuous decision variables. The system is represented using a simplified Centroidal dynamics model that is influenced by the feet’s location and forces. We explicitly enforce friction cone constraints, depending on the shape of the terrain. The NLP solver generates highly dynamic motion-plans with full flight-phases for a variety of legged systems with arbitrary morphologies in an efficient manner. We validate the feasibility of the generated plans in simulation and on the real quadruped robot ANYmal. Additionally, the entire solver software TOWR used to generate these motions is made freely available
Images
Bibtex
@article{winkler18,
author = {Winkler, Alexander W and Bellicoso, Dario C and Hutter, Marco and Buchli, Jonas},
title = {Gait and Trajectory Optimization for Legged Systems through Phase-based End-Effector Parameterization},
journal = {IEEE Robotics and Automation Letters (RA-L)},
year = {2018},
month = {July},
pages = {1560-1567},
doi = {10.1109/LRA.2018.2798285},
volume = {3},
keywords = {legged locomotion, trajectory optimization}
}